ความสามารถของรถของท่านในการเข้าใจสภาพโดยรอบทำได้โดยอาศัยระบบจำนวนมากและเซ็นเซอร์หลายประเภท การตีความข้อมูลที่เก็บรวบรวมมาของรถจะช่วยให้ท่านทราบลักษณะการทำงานของรถ โดยเฉพาะอย่างยิ่งคุณสมบัติระบบช่วยเหลือคนขับต่างๆ
| กล้อง | กล้องทำงานคล้ายกับดวงตาของมนุษย์ สิ่งที่กล้องจับภาพได้จะนำไปใช้ในจุดประสงค์ต่างๆ โดยขึ้นอยู่กับกล้อง ตัวอย่างเช่น กล้องที่หันไปทางด้านหน้าที่ด้านบนจะช่วยรถในการระบุสิ่งต่างๆ เช่น ป้ายจราจรบนถนนและเครื่องหมายบนพื้นผิวถนน ในขณะที่สิ่งที่กล้องช่วยขณะจอดด้านหลังจับภาพได้จะแสดงขึ้นบนจอแสดงผล |
| เรดาร์ | เรดาร์ใช้คลื่นวิทยุในการเก็บรวบรวมข้อมูลเกี่ยวกับสภาพโดยรอบตัวรถ โดยจะสามารถระบุระยะห่างจากวัตถุและลักษณะการเคลื่อนที่บางรูปแบบของวัตถุนั้นได้ ข้อมูลนี้เป็นสิ่งสำคัญสำหรับคุณสมบัติจำนวนมากภายในรถ |
| เซ็นเซอร์การจอดแบบอัลตร้าโซนิก | เซ็นเซอร์เหล่านี้ใช้คลื่นเสียงในการตรวจจับวัตถุที่อยู่ในระยะใกล้ เซ็นเซอร์ทำงานโดยการส่งพัลส์อัลตร้าโซนิกที่สามารถสะท้อนกลับมายังเซ็นเซอร์ได้เมื่อพัลส์พบกับวัตถุ |
ระบบต่างๆ ทำงานด้วยกันอย่างไร
การตรวจจับประเภทต่างๆ จะเป็นส่วนเสริมซึ่งกันและกัน ในบางครั้ง ระบบเหล่านี้จะทำงานด้วยตัวมันเอง และบางครั้งจะทำงานร่วมกัน
สำคัญ
ข้อจำกัดของการตรวจจับและการระบุโดยทั่วไป
- รถอาจไม่สามารถรับมือกับสถานการณ์ที่ไม่คาดคิดหรือสถานการณ์ที่ผิดปกติบางสถานการณ์ได้ เมื่อรถพบว่าการระบุสภาพแวดล้อมและสถานการณ์การจราจรให้ถูกต้องทำได้ยาก ความแม่นยำของการตอบสนองของรถจะได้รับผลกระทบ
- ความเสียหายของรถอาจส่งผลกระทบต่อการตรวจจับและคุณสมบัติที่ขึ้นอยู่กับการตรวจจับได้ รถสามารถระบุความผิดปกติได้เป็นจำนวนมาก แต่ก็มีความผิดปกติบางอย่างที่รถไม่สามารถระบุได้ต้วยตัวเอง นี่เป็นสาเหตุให้การรักษาให้รถอยู่ในสภาพดีและทำงานได้อย่างถูกต้องเป็นสิ่งสำคัญมาก ถ้าท่านสงสัยว่ามีความผิดปกติใดๆ หรือถ้าท่านสังเกตเห็นความเสียหายของรถ โปรดติดต่อศูนย์บริการวอลโว่ที่ได้รับอนุญาต
- บ่อยครั้งที่ปัจจัยและสภาพเงื่อนไขที่จะจำกัดการทำงานของรถจะเกิดขึ้นในเวลาเดียวกัน สิ่งเหล่านี้อาจรวมเข้าด้วยกันและโต้ตอบระหว่างกันและกัน และส่งผลให้การตอบสนองของรถไม่ถูกต้องได้
ข้อจำกัดของการตรวจจับสิ่งกีดขวาง
การตรวจจับสิ่งกีดขวางจะช่วยรถในการระบุวัตถุที่อยู่กับที่และวัตถุที่เคลื่อนที่บางอย่าง วัตถุเหล่านี้อาจเป็นผู้ใช้รถใช้ถนนรายอื่น เช่น คนเดินถนน, รถคันอื่น, สัตว์, ที่กั้นถนน หรือวัตถุอื่นๆ ถ้าวัตถุเหล่านี้อยู่ภายในหรือใกล้กับเส้นทางการขับขี่ของรถ ก็อาจทำให้มีความเสี่ยงต่อการชนได้ ถ้ารถสามารถระบุวัตถุนั้นได้อย่างแม่นยำ รถอาจทำการเตือนหรือเข้าแทรกการทำงานได้ ทั้งนี้จะขึ้นอยู่กับสถานการณ์ สำหรับวัตถุทุกประเภทที่รถสามารถระบุได้ จะมีปัจจัยจำนวนมากที่ทำให้รถไม่สามารถระบุวัตถุนั้นได้อย่างแม่นยำ ตัวอย่างของปัจจัย, สถานการณ์ และเหตุการณ์ที่จำกัดการทำงานนี้ได้แก่:
- วัตถุหรือผู้ใช้รถใช้ถนนที่อยู่ใกล้กันมาก, อยู่เหลื่อมกัน หรือถูกบังไว้บางส่วน
- วัตถุหรือผู้ใช้รถใช้ถนนที่กลืนไปกับพื้นหลัง
- วัตถุหรือผู้ใช้รถใช้ถนนที่เคลื่อนที่หรือเร่งความเร็วอย่างรวดเร็วมาก
- ยานพาหนะที่แตกต่างไปจากยานพาหนะทั่วไป เช่น รถจักรยานแบบนอนปั่น, รถเก็บเกี่ยวพืชผล หรือรถพ่วงที่บรรทุกของที่มีรูปร่างแปลกๆ
- รถจักรยานที่มีลักษณะหรือขนาดแตกต่างไปจากรถจักรยานสำหรับผู้ใหญ่โดยทั่วไป
- โหมดการขนส่งแบบใหม่
- เครื่องแต่งกายหรือของที่ถืออยู่อาจทำให้โครงร่างของคนเดินถนนเปลี่ยนแปลงไปได้
- คนเดินถนนที่มีความสูงไม่ถึง 80 ซม. (32 นิ้ว)
- สิ่งกีดขวางที่เอียงในลักษณะที่ทำให้มีโครงร่างที่ระบบไม่รู้จัก
- ขนาดและความเร็วของสัตว์ แมวและสุนัขมักจะมีขนาดเล็กเกินกว่าที่จะสามารถระบุได้อย่างแน่นอน
บันทึก
ตัวอย่างของการตรวจจับการจราจร
ตัวอย่างของสถานการณ์การจราจรต่อไปนี้อาจช่วยให้ท่านเข้าใจข้อจำกัดบางอย่างของระบบตรวจจับของรถของท่านได้ สถานการณ์ในความเป็นจริงมักจะมีความสลับซับซ้อนมากกว่าตัวอย่างที่แสดง 1 ในคู่มือฉบับนี้
อยู่นอกพื้นที่การตรวจจับและการตรวจจับล่าช้า
โซนการตรวจจับรอบตัวรถของท่านจะเป็นแบบตายตัว โดยแต่ละโซนจะมีช่วงและพื้นที่การมองเห็นที่จำกัด ถ้ามีบางสิ่งบางอย่างเข้ามาในโซนการตรวจจับในมุมที่ผิดปกติ, ด้วยความเร็วสูง หรือในระยะใกล้กับรถของท่านมาก ก็อาจทำให้เกิดการตอบสนองอย่างรวดเร็วได้ ลักษณะเช่นนี้ทำให้ระยะเวลาสำหรับการดำเนินการเพื่อความปลอดภัยลดลง เมื่อเทียบกับสถานการณ์ที่สามารถตรวจจับล่วงหน้าได้
สำคัญ
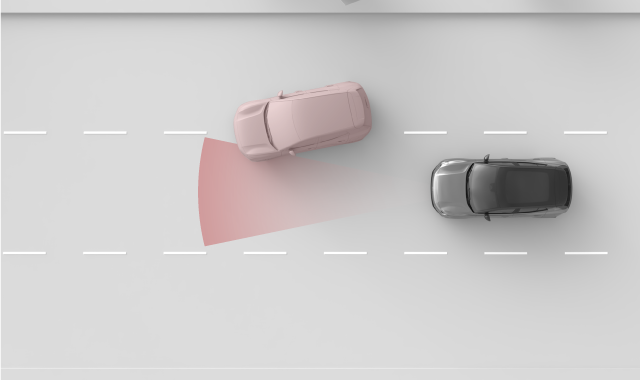
ตำแหน่งในช่องทางเดินรถและรถขนาดเล็ก
สำหรับการตรวจจับด้านหน้า คุณสมบัตินี้จะทำงานได้ดีกว่าในบริเวณตรงกลางของช่องทางเดินรถ เมื่อเทียบกับบริเวณส่วนด้านนอกของช่องทางเดินรถ คุณสมบัตินี้อาจไม่สามารถตรวจจับรถคันอื่นได้ ถ้ารถคันนั้นไม่อยู่ในบริเวณตรงกลางของช่องทางเดินรถ ในขณะที่ลักษณะเช่นนี้อาจเกิดขึ้นกับรถคันใดก็ได้ แต่ความเสี่ยงจะสูงขึ้นสำหรับรถที่มีขนาดเล็ก เช่น รถจักรยานยนต์ เป็นต้น รถเหล่านี้ใช้พื้นที่ตามความกว้างของช่องทางเดินรถน้อยกว่า และสามารถเปลี่ยนตำแหน่งไปมาภายในช่องทางเดินรถได้มากกว่า ให้ความสนใจกับรถที่ไม่ได้ขับอยู่บริเวณตรงกลางของช่องทางเดินรถเป็นพิเศษ
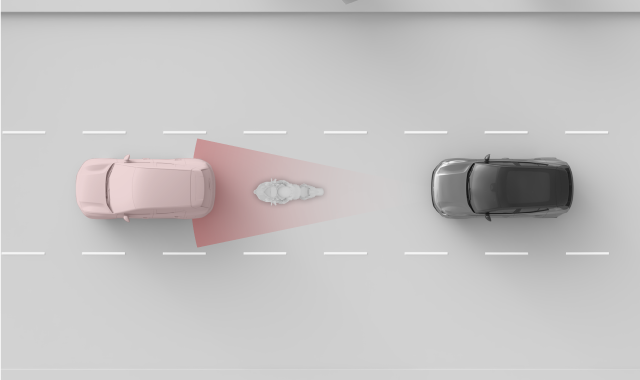
ขนาด, รูปร่าง และจำนวนของวัตถุ
- วัตถุขนาดเล็กจะระบุได้ยากกว่า
- ยิ่งมีวัตถุเป็นจำนวนมากเท่าใด การระบุวัตถุแต่ละอย่างก็ยากขึ้นเท่านั้น
- วัตถุที่อยู่ใกล้กันและอยู่ในตำแหน่งที่เหลื่อมกันจะระบุได้ยากขึ้น
- วัตถุที่มีรูปร่างไม่สมมาตร เช่น มีส่วนยื่นออกมา จะระบุได้ยาก
การมีรถยนต์ขนาดใหญ่อยู่ข้างหน้าอาจทำให้การระบุรถที่มีขนาดเล็กกว่า เช่น รถจักรยานยนต์ ทำได้ยาก
สำคัญ
รถพ่วงที่อยู่ข้างหน้า
เมื่อเทียบกับรถประเภทอื่นๆ บนถนนแล้ว การตรวจจับรถพ่วงมักจะมีความแม่นยำน้อยกว่ามาก ทั้งนี้ก็เนื่องจากรูปร่างและความสูงของรถพ่วง โดยเฉพาะอย่างยิ่งรถพ่วงที่แคบ, รถพ่วงที่ต่ำ และรถพ่วงที่มีกระบะบรรทุกสูงมาก รถพ่วงเหล่านี้มักจะมีพื้นผิวไม่เพียงพอที่ระดับความสูงที่ระบบตรวจจับด้านหน้าใช้สำหรับการตรวจจับ
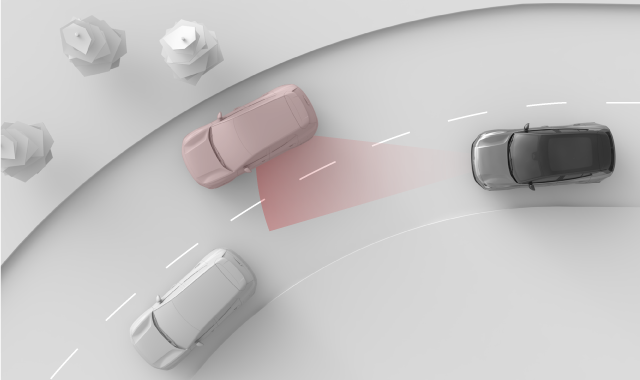
ถนนและโครงสร้างพื้นฐาน
ทางโค้งบนถนนอาจเป็นสาเหตุให้รถตีความหมายของสถานการณ์การจราจรไม่ถูกต้องได้ ตัวอย่างเช่น อาจไม่สามารถตรวจจับรถที่ตรวจติดตามอยู่ก่อนหน้านี้ได้ หรือการระบุช่องทางเดินรถที่รถมุ่งหน้าไปไม่ถูกต้อง เป็นต้น
สำคัญ
สภาพถนนและความไม่สม่ำเสมอ
- ทางโค้งหักศอกและลูกระนาดบนถนนอาจบดบังส่วนที่สำคัญของสภาพโดยรอบตัวรถเป็นการชั่วคราว เช่น รถคันอื่นหรือเส้นแบ่งช่องทางเดินรถ เป็นต้น
- โครงสร้างพื้นฐานของถนนที่ไม่เป็นไปตามมาตรฐานอาจทำให้รถระบุได้ไม่ถูกต้อง ตัวอย่างเช่น การทำถนนหรือการเบี่ยงเส้นทางจราจรอาจส่งผลให้มีเส้นแบ่งช่องทางเดินรถที่ขัดแย้งกันหรือมีหลายเส้นได้
- เครื่องหมายแบ่งช่องทางเดินรถบนถนนที่สึกแล้วอาจทำให้รถระบุได้ไม่ถูกต้อง